
[This paper was written by the following student members of The Space Society at the Texas Academy of Mathematics and Science (TAMS): Abhinav Gopalkrishnan, Om Joshi, Serene Wang, Sanjana Viswaprabakaran, Saharsh Tavva, Bryan Wang, Tamoghna Naladala, Aryakrishna Kanakamedla; University of North Texas]
Abstract
Driven by Earth’s increasing environmental concerns, the idea of establishing a sustainable human presence on Mars transformed from what once was an idea to a vital necessity. This paper explored how automation and robotics are necessary to overcome the logical and engineering challenges that inhibit creating a large orbital settlement in orbit around Mars. This paper details a comprehensive framework for a robotic ecosystem designed for extraterrestrial construction and maintenance and daily life. This framework includes specialized bots for exterior construction such as Scaffold Bots that erect foundational structures and Mantis Bots that perform modular operations like welding and drilling (NASA NIAC, 2017). For structural integrity and maintenance, FLIERbots will utilize LIDAR to detect and repair damage, supplemented by nanobots for molecular-level repairs. The system also integrates automations for industrial and domestic support, including Nurse Bots for medical assistance, Commando Bots for logistical oversight, and various residential bots to manage cleaning, supplies, and personal tasks. For smooth connection between human settlers, these automations are managed through a centralized command interface, ensuring both operational efficiency and safety via human oversight and intervention protocols. This exploration demonstrates that a deeply integrated automation strategy is not merely an auxiliary tool but the core component for making Martian colonization a feasible reality.
Keywords: Mars Settlement, Automation, Robotics, Extraterrestrial Construction, Human-Robot Interaction, Sca:olding Bots, Life Support Systems, In-Situ Resource Utilization (ISRU), Command and Control, Sustainable Colonization
Introduction
Human civilization has thrived on Earth for millennia, sustained by its unique environmental conditions and abundant resources. This planetary endowment has fostered unprecedented growth and technological advancement. However, centuries of industrialization and unchecked consumption have led to profound environmental degradation, pushing our home planet towards critical tipping points (Whetsel et al. 2025). Mars, the fourth planet from the Sun, has emerged as the most promising frontier for human settlement. It offers a potential “second basket” for humanity’s future, providing a crucial diversification of civilization’s footprint. Yet, establishing a sustainable presence on this “dusty, cold, desert world with a very thin atmosphere” presents unprecedented engineering and logistical challenges. The extreme conditions on Mars, coupled with the vast distances involved in interplanetary travel, demand innovative solutions that transcend traditional human-centric approaches (Whetsel et al. 2025).
This paper will explore the dual imperative of Martian settlement: first, the environmental exigencies on Earth that compel humanity to look outward for long-term survival and resilience; and second, the critical role of automation and robotics as the enabling technology that transforms the aspiration of living at Mars into a feasible reality. The analysis will demonstrate how robotic systems are not merely supplementary tools but fundamental components for overcoming the inherent limitations of human operations in an extraterrestrial environment, allowing humanity to branch out beyond life on Earth.
Exterior Construction of an Orbital Mars Space Settlement
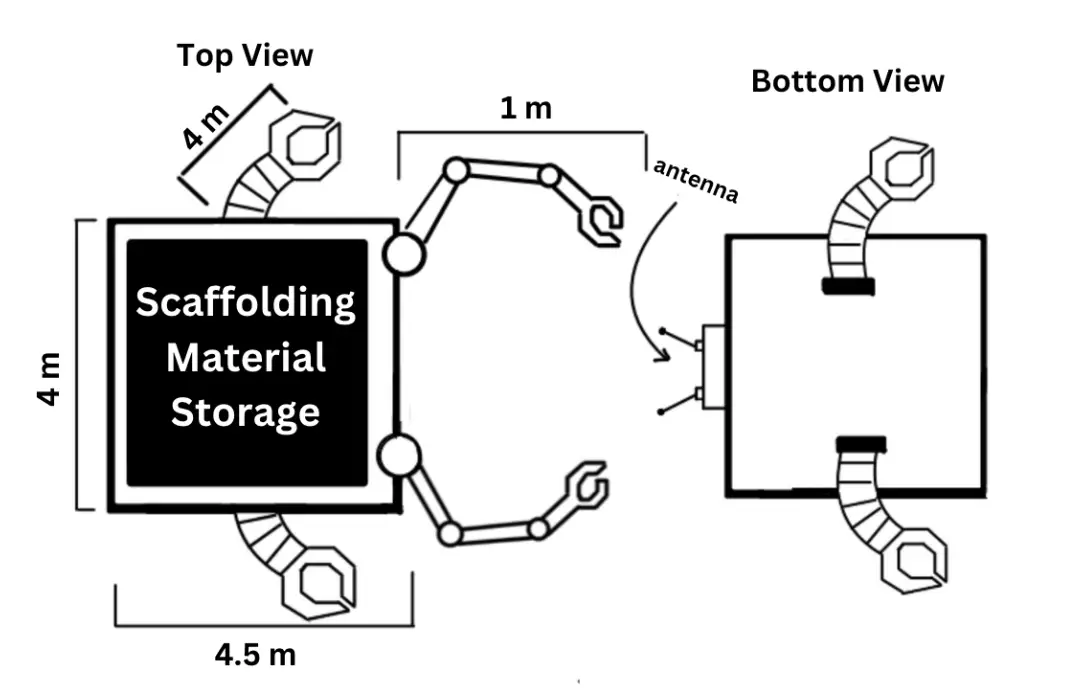
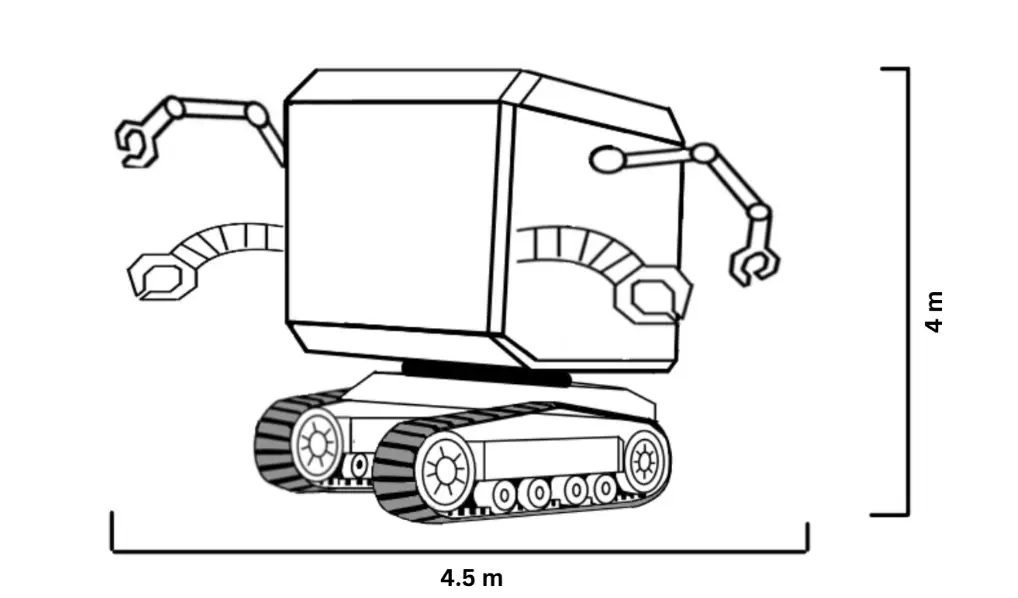
The scaffolding is an assembled network of robot bases and traversal paths (nodes and pathways). The scaffold Module is a robot part associated with the scaffolding setup. This robot will help link and extend pathways and help direct the placement of nodes. To ensure its durability this automation will be built utilizing Aluminum alloys – specifically Aluminum alloy 6061 which is known for how lightweight it is while providing an abundance of strength for functionality. Moreover, Aluminum alloys are known for their resistance to corrosion and thermal conductivity. In the context of construction of the Mars Orbital Space Settlement, the scaffolding robots will build long scaffold structures for the Mantis robots and inspection robots to begin construction of the central shaft. The scaffold bots will attach the scaffolding beams at nodes to ensure even construction. Then, they will construct perpendicular scaffolds for the other construction robots to build the necessary portions of a large orbital settlement. The scaffold bots will additionally transport materials to assist the other construction robots (Figure 1, Figure 2, Figure 3).

The Mantis Bot is specialized to perform construction while attached to the scaffolding laid by the scaffold bots. In addition to legs that can attach to the scaffolds, the Mantis Bots have multiple modular arms outfitted with multiple tools (welding, drilling, etc.) to conduct major operations. For this automation to be able to efficiently carry out its tasks it will be built with Aluminum alloy 6061 which will allow a robot of this size to move much more easily and provide it with the necessary power to carry out its tasks (Figure 4) (Liu et al. 2023).
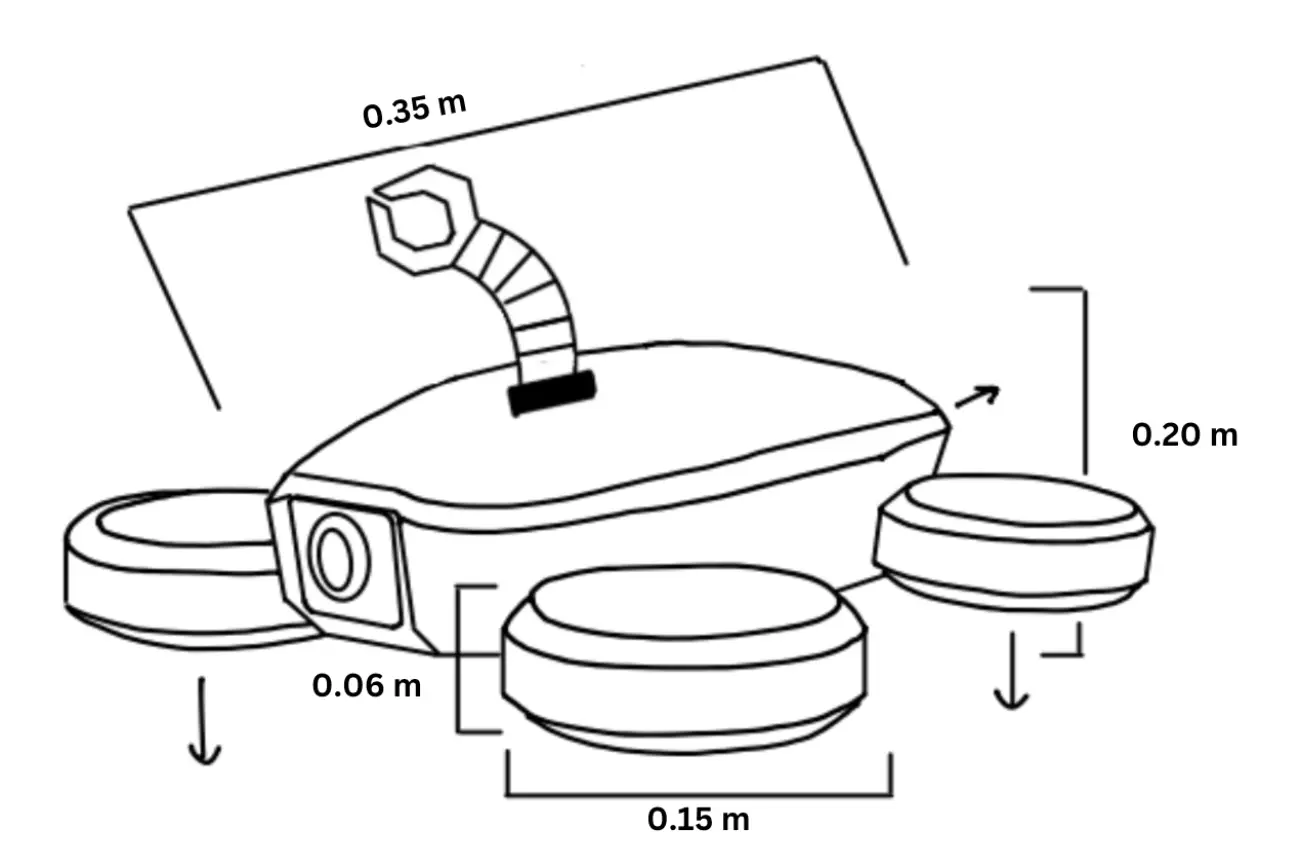
The FLIERbot’s primary focus is to detect damage in the structure and alert the other construction robots for repair. The FLIERbot hosts an advanced LIDAR scanner to detect defects. The FLIERbot can repair small damage with its modular arm, such as sealing holes with nanobots. The microscopic robots perform tasks at the molecular level – primarily modifying molecules to form an airtight seal on interior surfaces, fusing coatings on surfaces, and separating elements mixed in metallic asteroids. The bot also comes equipped with a high-powered antenna to host communication with other robots. To send communications back to Earth, servers will be placed at Mars and Earth allowing us to store and work with data and information sent from Mars orbit.
Each node will have an automated inventory management system for managing raw materials, constructed components, and robot parts. Sensors, attached to the robots, pathways, and essential systems on nodes, will relay information to inventory management systems. Transmitters will send this data back to Earth. The nodes will oversee the rotation of the rings when the external rings start.
Construction jig robots consist of nodes and pathways. To utilize these nodes and pathways they have large circular platforms designed to link pathways. Pathways can be attached to any face or side of the nodes. This allows for robots to work together and switch out with each other for efficient construction. Each face/side will have multiple sockets to ensure coverage of the occupied volume. Additionally, it will provide robot charging and will provide manufacturing functionality for imported raw materials. The Power will be derived from solar panels attached to the nodes. Attached to the construction jig robots, we have welding modules as traditional welding does not work in space. This is because of relying on shielding gases to make sure that the welding tools are not contaminated. As a result, these robots will consider alternative methods such as Cold Welding and Vacuum Welding (Liu et al. 2023). Cold Welding uses pressure to bond two or more metal surfaces: this is advantageous to mitigating structural damage to spacecraft from high temperatures. Furthermore, the environment of space favors Cold Welding as it allows surfaces to fuse together easier (Lia et al. 2023). Vacuum Welding is a specialized joining process utilizing the vacuum environment provided in space. In the process it eliminates atmospheric interference and allows for an overall stronger, cleaner and more precise welding. Additionally, there is a Swiss Army module. It allows the construction bot to contain many different tools such as plates, screws, bolts, etc. to hold things and place and adjust components. Lastly, there will be a 3D Printing module for manufacturing small-medium sized components when needed (SEArch+, 2019).
Automations for Industrial Systems
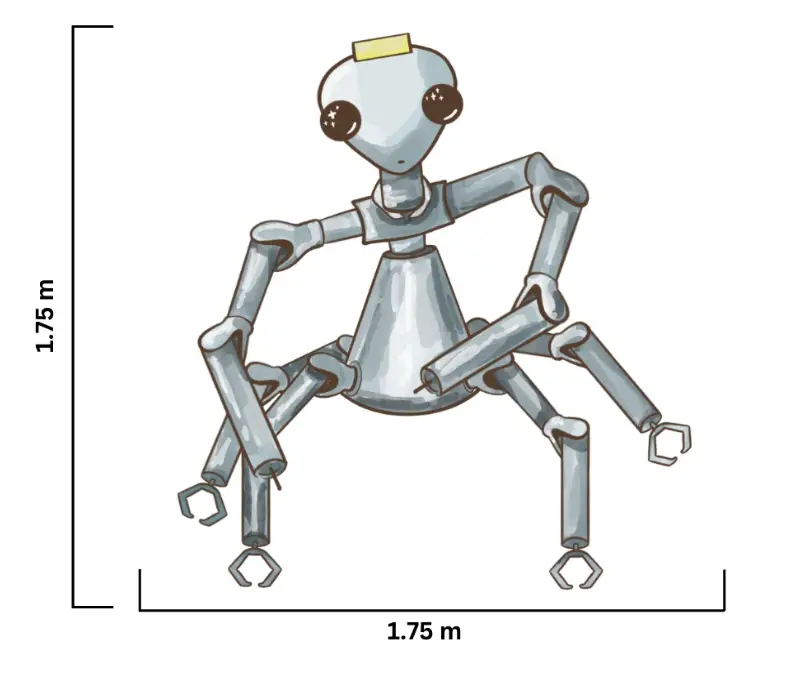
A nurse bot is necessary for an operational large orbital settlement. The soft material the nurse bot is made of will allow for transportation of the settlers and treatment of settlers to be executed with minimal pain to the settlers. The nurse bot has humanoid features such as eyes and ears. The ears will allow the robot to understand what the patient is feeling, and the eyes will allow the robot to analyze any physical injuries or symptoms they might be experiencing. All in all, this will allow the nurse bot to come up with an accurate analysis for most accurate treatment for the patient.
A commando robot is necessary for efficient delivery of information. The speed and agility of this robot will allow for it to relay instructions to robots fast and efficiently. Additionally, this bot plays a crucial role in delivering information on the status of specific robots and how far their tasks have progressed. This automation to reduce corrosion of the overall robot will be made from Aluminum alloy 6061. Moreover, this alloy will allow for its speed and agility. Nanobots will be responsible for protecting the overall settlement from breaches by outside forces. They will also be serving the purpose of repairing robots that have malfunctioned or have been damaged quickly and accurately due to their size (Liu et al. 2023).
Automation in Coherence with humans
The Scaffolding Bot is initially used to build the orbital settlement, storing materials and tools within its box-like body shape. Additionally, it utilizes flexible robot arms, jigs, and clamps which allow the robot to maintain precise alignment of components until they are joined (Liu et al. 2023). This utilitarian construction robot, with the utilization of its tracks once the settlement is built, will be able to work parallelly to humans serving to pick up heavy and huge materials and provide for tools that would otherwise be inefficient to carry around with them. To maintain an order during the construction of the settlement and to make sure that robots are completing tasks they are assigned in an orderly and proper fashion, the settlement utilizes the Commando Bots. The Commando Bot will collect information on task progression for tasks and push it to the command servers, making the data available to humans on the command interface. Additionally, after the settlement is created, there needs to be an alert system which will be able to instantly deploy robots or human forces in order to maintain safety of the settlers in the case of a fire, criminal activity, severe injuries, etc. For this the settlement will have an automation system that will alert the necessary department (Fire, Hospital, or Police) on the problem that is occurring based on either reports from settlers or from the data delivered by the Commando Bot itself. Lastly, the Nurse Bot will analyze the patient by either asking or checking for symptoms and after analysis the Nurse Bot will send out a diagnosis and a potential course of action to the doctor (Liu et al. 2023). This will allow for more patients to be saved quicker as the diagnosis is carried out swiftly by the Nurse Bot.
Human Intervention with Automations
There can be problems in automations. This can be as a result of glitches or malfunctions and this can become a very dangerous situation for humans that are around a robot during a time of a glitch or malfunction in an automation (Liu et al. 2023). In order to deal with these sorts of problems we would need to have a medical team for bots that can be dispatched exactly when needed. This would be a part of the automation where it would alert the necessary department on the issue within the settlement. This would be done through the Command Interface where all the data on the automations is held. In fact, the personnel managing the command interface will be able to take the necessary action to ensure the safety of the settlers in the settlement. The interface allows personnel to do so by turning the robot profile on the interface from a green circle to a red circle which the personnel would click on giving them details on the issue of the robot and they can act by turning off the robot. Additionally, the interface allows the personnel to reassign tasks to robots to ensure that certain tasks are finished more efficiently.
In the settlement an encrypted system with three factor authentication utilizing password, fingerprint and a facial scan will be established. This will be integrated with the Command interface to ensure that unauthorized personnel cannot access the data and control over the automations to maintain safety in the settlement.
To protect private or personal data our system will force users to create strong, unique passwords, enabling two-factor authentication. Furthermore, we will be implementing security measures, such as access control systems.
To enhance the Martian Community Livability Devices & Systems we utilize Autonomous Greenhouse Drones which monitor and tend to hydroponic crops in pressurized domes. These domes utilize Radiation-Shielded Habitats which function by utilizing self-repairing polymer membranes triggered by micrometeorite impacts.
In addition to this, to enhance livability we will utilize Dust Mitigation Drones: Electrostatic brushes to clear solar panels and Multi-Functional Domestic Robots to help clean dust, recycle water/air, and prepare meals using lab-grown proteins.
In our settlement we utilize a multitude of Maintenance & Routine Task Robots. The first being the Multi-Functional Domestic Robot (MFDR) which recycles air/water and prepares meals using lab-grown proteins, vacuum, scrubber, and meal-prep arms. Additionally, the robot will have to follow Lidar for navigation and UV sterilizers for hygiene. In order to maintain privacy, the robot will be limited to local data processing and no cloud storage for household activities. Next, our settlement will include 3D Printing Repair Drones which will swarm-print replacement parts for infrastructure using ISRU metals and utilize a 5kg metal feedstock. The settlement also includes productivity and work assistants such as the Butler Bot which delivers tools, luggage and supplies and serves to assist construction crews. It also has the addition of RFID tracking for inventory management. And the Gym Trainer Bot which motivates settlers during workouts, adjusts weights and ensures safety of the settlers during training sessions. It includes reinforced hydraulic arms which are 2 meters in height and can take a 500 kg load capacity and includes motion tracking to correct form. Then we have Residential Convenience Bots such as the Maid Bot which serves to clean residences, organize supplies and manage waste. To maintain privacy the robot’s monitoring feature can be disabled via voice command ‘Blackout Mode’. And the Wearable Task Manager (Bracelet) which functions as a holographic projector, size being 10 centimeters, to show schedules, deliver urgent alerts and control home robots. To add encryption and security to this device we have biometric authentication such as fingerprint, voice recognition. Lastly, we have the Privacy and Control automations such as Data Security which will be within personal devices such as bracelets to store data locally and you may opt-in for cloud sync. Under this automation robots will operate in offline mode in private spaces by default. Lastly, there is the user override function for the safety of the settlers, there is a physical kill switch on all the robots and there are voice commands to provide convenience of operating the robots on the settlement in case the authorized personnel with command interface are unable to take action.
Martian Communication Systems
The Mars-Earth Communication Satellites will have laser-relay networks for high-bandwidth data (2 Mbps uplink, 10 Mbps downlink). They will also include TLS and SSL web browsing and WPA2 and WPA3 wifi. In order to make sure that information is encrypted, RSA (general data encryption and transfer; asymmetric encryption) and AES (bulk data encryption and transfer; symmetric encryption) will be used.
Data gets lost in transit as a result of spotty internet at times and this can cause certain hiccups in connection and information to get lost in the process. Additionally, black hats can gain access to this information and even change this information while traveling. As a result encryption might help preserve data loss and shield data from becoming visible to black hats. For websites and apps the utilization of HTTPS will prove fruitful in providing strong encryption from black hats. In addition, DLP Systems can watch information travel across networks, and stop malicious acts from occurring such as malicious actors gaining access and manipulating data traveling across networks.

Critical websites will be updated hourly and stored on the large orbital settlement in servers, where users will be able to load websites without delay. This, alongside holding communication data amongst residents will require a maximum of 1000 TB. For redundancy and error correction purposes, we will need 4 servers with 24 x 15 TB SSDs (each = 360 TB raw, total 1.08 PB usable) onsite. In addition, an advanced AI model will also be hosted on the settlement in case any users need immediate answers that cannot be looked up. The LLM itself would require around 10 GB of space and would be trained on the new information uploaded by the internet. The resident’s AI would be updated monthly. The monthly data collected by the servers would then be off-loaded to the Mars orbital satellites, which will eventually delete the data when they require more space (Dong & Akan, 2025).
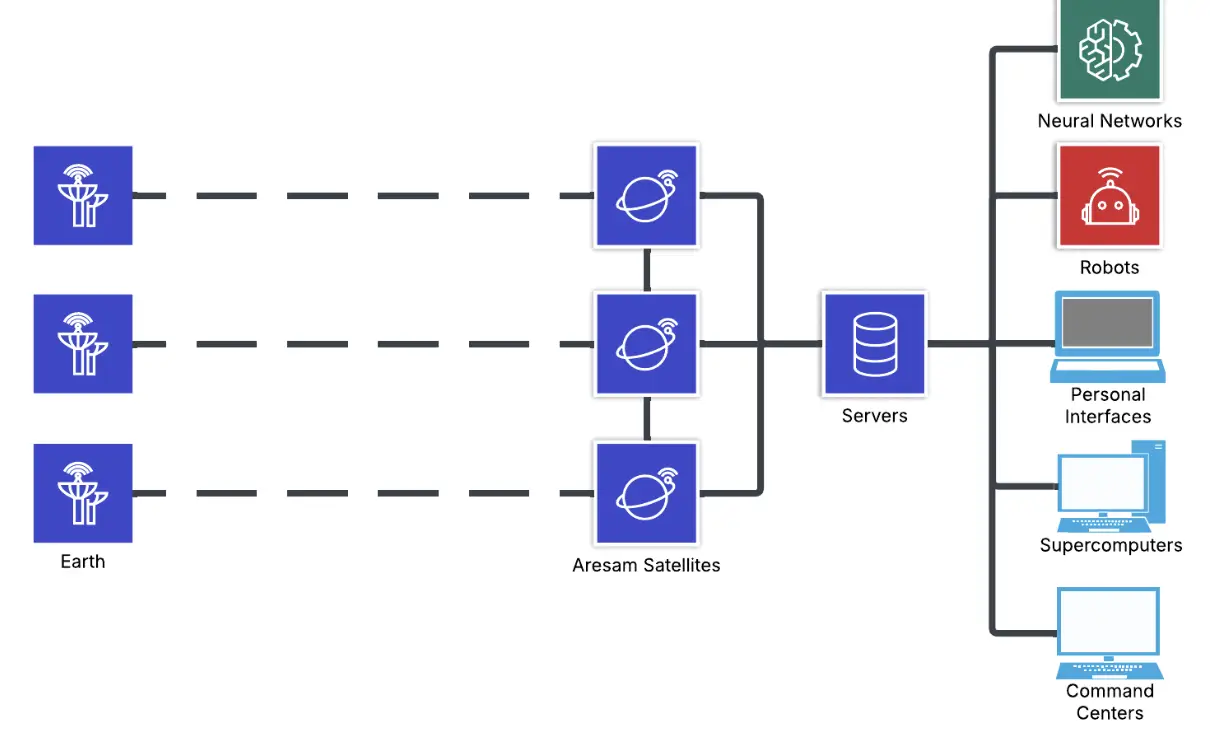
Internet connectivity between the large orbital settlement and Earth will be facilitated by a network of Mars orbital (4 for residential, 3 for transport) and Earth orbital satellites using the NASA Deep Space Network (NASA SSE, ~2016). Contrary to contemporary networking, the connection between Earth and the Mars Orbital Settlement will not rely on a continuously established route to transfer data. Rather, the networks will use a store and forward approach where data is stored in satellites until a connection to the next step in the network is established (Whetsel et al. 2025). The NASA Interplanetary Overlay Network (ION) framework will be used to establish this form of communication (NASA JPL, 2024). Mars orbital satellites will compare information with each other as a form of error correction and decryption. In the case of solar conjunctions, the users will be alerted a few days in advance while the Mars orbital satellites will store additional data (Rodriguez et al., 2025). The data from the previous month will stay on-site during the two-week conjunction.
References
Bhasin, K., Hayden, J., Agre, J. R., Clare, L. P., & Yan, T.-Y. (2001, September 1). Advanced Communication and Networking Technologies for Mars Exploration. Ntrs.nasa.gov. https://ntrs.nasa.gov/citations/20010091011
Dong, H., & Akan, O. B. (2020). MASC: Integrated Sensing and Communications for the Martian Internet of Space. Arxiv.org. https://arxiv.org/html/2506.16198v1
Hemmati, H., Biswas, A., & Djordjevic, I. B. (2011). Deep- Space Optical Communications: Future Perspectives and Applications. Proceedings of the IEEE, 99(11), 20202039. https://doi.org/10.1109/JPROC.2011.2160609
Khoshnevis, B., Carlson, A., & Thangavelu, M. (2017). ISRU- Based Robotic Construction Technologies For Lunar And Martian Infrastructures. Ntrs.nasa.gov. https://ntrs.nasa.gov/citations/20170004640
Liu, R., Vahid Koliyaee, Lucak, F., & Guo, Y. (2023, April 15). Changing Roles of Human in the Human-Robot Interactions in Design and Construction. ResearchGate; unknown. https://www.researchgate.net/publication/378006870_Changing_Roles_of_Human_in_the_Human-Robot_Interactions_in_Design_and_Construction
Rodriguez, E. F., Rowland, Z. C., & Overzier, R. A. (2023). On the feasibility of laser satellite communications from the Martian surface. Arxiv.org. https://arxiv.org/html/2504.16955v1
Wang, W., Pan, W., Dong, S., Lei, J., & Yang, S. (2025). Study on Vacuum Cold Welding Prevention of In- Orbit Refueling Pipeline Disconnection. Lecture Notes in Electrical Engineering, 133141. https://doi.org/10.1007/978-981-96-2264-1_13
Whetsel, C., Levine, J. S., Hoffman, S. J., Luckey, C. M., Watts, K. D., & Antonsen, E. L. (2025). Utilizing Martian samples for future planetary exploration Characterizing hazards and resources. Proceedings of the National Academy of Sciences, 122(2). https://doi.org/10.1073/pnas.2404251121
Yashar, M., Chenniuntai, N., Sergey Nefedov, & Pender, S. (2019, October 24). Robotic Construction & Prototyping of a 3D-Printed Mars Surface Habitat. ResearchGate; unknown. https://www.researchgate.net/publication/336778488_Robotic_Construction_Prototyping_of_a_3D-Printed_Mars_Surface_Habitat
About the Authors and The Space Society at the Texas Academy of Mathematics and Science (TAMS)
The Space Society at the Texas Academy of Mathematics and Science (TAMS) is a student organization dedicated to advancing academic and practical understanding in aerospace engineering and astronomy. The society facilitates the application of members’ skills in STEM, leadership, and project management. A central activity is participation in the NASA Space Settlement Design Competition, where our teams have earned national recognition and now compete internationally, providing members direct engagement with NASA professionals. The society also conducts educational outreach and promotes scientific literacy through informative assemblies and community astronomical observation events to foster development in space-related disciplines.